

Verilog基础【一】



最近需要从原型验证切到EDA去做做,于是先温习一下Verilog。
在开始之前,先来一个Verilog设计。
1.1 第一个verilog设计
4 位宽 10 进制计数器:
module counter10(
//端口定义
input rstn, //复位端,低有效
input clk, //输入时钟
output [3:0] cnt, //计数输出
output cout); //溢出位
reg [3:0] cnt_temp ; //计数器寄存器
always@(posedge clk or negedge rstn) begin
if(! rstn)begin //复位时,计时归0
cnt_temp <= 4'b0 ;
end
else if (cnt_temp==4'd9) begin //计时10个cycle时,计时归0
cnt_temp <=4'b000;
end
else begin //计时加1
cnt_temp <= cnt_temp + 1'b1 ;
end
end
assign cout = (cnt_temp==4'd9) ; //输出周期位
assign cnt = cnt_temp ; //输出实时计时器
endmodule
1.2 Verilog 简介
不展开,占用篇幅了。
感兴趣--->Verilog 简介
1.3 Verilog环境搭建
因为只是想学习一下Verilog的基本语法,因此先不涉及。
感兴趣--->Verilog环境搭建
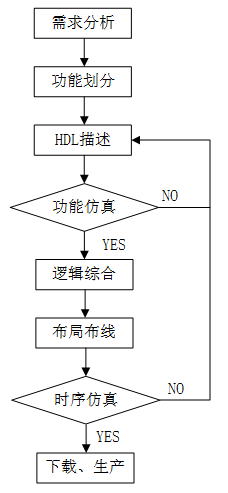
1.4 Verilog 设计方法
设计方法
核心点:自顶向下

于是就诞生了单元模块和集成
设计流程
2.1 Verilog 基础语法
格式
- 区分大小写
- 格式自由,可以在一行内编写,也可跨多行编写。
- 每个语句必须以分号为结束符。
- 空白符(换行、制表、空格)都没有实际的意义,在编译阶段可忽略。
关键点还是要注意分行,提升代码的可读性。和软件一样的。
wire [1:0] results ;assign results = (a == 1'b0) ? 2'b01 : (b==1'b0) ? 2'b10 : 2'b11 ;
wire [1:0] results ;
assign results = (a == 1'b0) ? 2'b01 :
(b==1'b0) ? 2'b10 :
2'b11 ;
很明显下面的好看些。
注释
- 用 // 进行单行注释:
- 用 /* 与 / 进行跨行注释用 / 与 */ 进行跨行注释
标识符与关键字
-
标识符的第一个字符必须是字母或者下划线,不能以数字或者美元符开始。
-
标识符是区分大小写的。
-
关键字是 Verilog 中预留的用于定义语言结构的特殊标识符。
-
Verilog 中关键字全部为小写。
reg [3:0] counter ; //reg 为关键字, counter 为标识符
input clk; //input 为关键字,clk 为标识符
input CLK; //CLK 与 clk是 2 个不同的标识符
2.2 Verilog 数值表示
数值种类
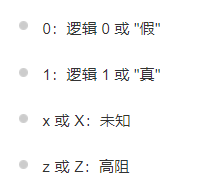 四种基本的值 = 硬件电路中的电平逻辑
四种基本的值 = 硬件电路中的电平逻辑

整数数值表示方法
数字声明时,合法的基数格式有 4 中:
- 十进制('d 或 'D),
- 十六进制('h 或 'H),
- 二进制('b 或 'B),
- 八进制('o 或 'O)。
数值可指明位宽,也可不指明位宽。
4'b1011 // 4bit 数值
32'h3022_c0de // 32bit 的数值
_ 是为了增强代码的可读性。
不指明位宽:
一般直接写数字时,默认为十进制表示,例如下面的 3 种写法是等效的:
counter = 'd100 ; //一般会根据编译器自动分频位宽,常见的为32bit
counter = 100 ;
counter = 32'h64 ;
负数表示
-6'd15
-15
- -15 在 5 位二进制中的形式为 5'b10001,
- 在 6 位二进制中的形式为 6'b11_0001。
需要注意的是,减号放在基数和数字之间是非法的,例如下面的表示方法是错误的:
4'd-2 //非法说明
实数表示方法
实数表示方法主要有两种方式:
十进制:
30.123
6.0
3.0
0.001
科学计数法:
1.2e4 //大小为12000
1_0001e4 //大小为100010000
1E-3 //大小为0.001
字符串表示方法
字符串是由双引号包起来的字符队列。
字符串不能多行书写,即字符串中不能包含回车符。
reg [0: 14*8-1] str ;
initial begin
str = "www.runoob.com";
end
2.3 Verilog 数据类型
- 线网(wire)
- 寄存器(reg)
线网(wire)
wire 类型表示硬件单元之间的物理连线,由其连接的器件输出端连续驱动。如果没有驱动元件连接到 wire 型变量,缺省值一般为 "Z"。(高阻态)举例如下:
wire interrupt ;
wire flag1, flag2 ;
wire gnd = 1'b0 ;
线网型还有其他数据类型,包括 wand,wor,wri,triand,trior,trireg 等,不常用。
寄存器(reg)
寄存器(reg)用来表示存储单元,它会保持数据原有的值,直到被改写。
reg clk_temp;
reg flag1, flag2 ;
- 例如在 always 块中,寄存器可能被综合成边沿触发器,
- 在组合逻辑中可能被综合成 wire 型变量。
- 寄存器不需要驱动源,也不一定需要时钟信号。
- 在仿真时,寄存器的值可在任意时刻通过赋值操作进行改写。例如:
这就是为什么逻辑设计,仿真的重要性。
reg rstn ;
initial begin
rstn = 1'b0 ;
#100 ;
rstn = 1'b1 ;
end
向量
当位宽大于 1 时,wire 或 reg 即可声明为向量的形式。例如:
reg [3:0] counter ; //声明4bit位宽的寄存器counter
wire [32-1:0] gpio_data; //声明32bit位宽的线型变量gpio_data
wire [8:2] addr ; //声明7bit位宽的线型变量addr,位宽范围为8:2
reg [0:31] data ; //声明32bit位宽的寄存器变量data, 最高有效位为0
可以指定某一位或若干相邻位
wire [9:0] data_low = data[0:9] ;
addr_temp[3:2] = addr[8:7] + 1'b1 ;
Verilog 支持可变的向量域选择:
reg [31:0] data1 ;
reg [7:0] byte1 [3:0];
integer j ;
always@* begin
for (j=0; j<=3;j=j+1) begin
byte1[j] = data1[(j+1)*8-1 : j*8];
//把data1[7:0]…data1[31:24]依次赋值给byte1[0][7:0]…byte[3][7:0]
end
end
Verillog 还支持指定 bit 位后固定位宽的向量域选择访问。
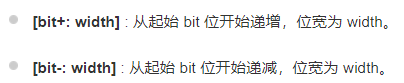
//下面 2 种赋值是等效的
A = data1[31-: 8] ;
A = data1[31:24] ;
//下面 2 种赋值是等效的
B = data1[0+ : 8] ;
B = data1[0:7] ;
对信号重新进行组合成新的向量时,需要借助大括号
wire [31:0] temp1, temp2 ;
assign temp1 = {byte1[0][7:0], data1[31:8]}; //数据拼接
assign temp2 = {32{1'b0}}; //赋值32位的数值0
整数,实数,时间寄存器变量
整数,实数,时间等数据类型实际也属于寄存器类型。
整数(integer)
整数类型用关键字 integer 来声明。声明时不用指明位宽,位宽和编译器有关,一般为32 bit。
reg 型变量为无符号数,而 integer 型变量为有符号数。
reg [31:0] data1 ;
reg [3:0] byte1 [7:0]; //数组变量,后续介绍
integer j ; //整型变量,用来辅助生成数字电路
always@* begin
for (j=0; j<=3;j=j+1) begin
byte1[j] = data1[(j+1)*8-1 : j*8];
//把data1[7:0]…data1[31:24]依次赋值给byte1[0][7:0]…byte[3][7:0]
end
end
integer 信号 j 作为辅助信号,将 data1 的数据依次赋值给数组 byte1。综合后实际电路里并没有 j 这个信号,j 只是辅助生成相应的硬件电路。
实数(real)
实数用关键字 real 来声明,可用十进制或科学计数法来表示。
real data1 ;
integer temp ;
initial begin
data1 = 2e3 ;
data1 = 3.75 ;
end
initial begin
temp = data1 ; //temp 值的大小为3
end
时间(time)
Verilog 使用特殊的时间寄存器 time 型变量,对仿真时间进行保存。
其宽度一般为 64 bit,通过调用系统函数 $time 获取当前仿真时间。
time current_time ;
initial begin
#100 ;
current_time = $time ; //current_time 的大小为 100
end
数组
在 Verilog 中允许声明 reg, wire, integer, time, real 及其向量类型的数组。
数组维数没有限制。
线网数组也可以用于连接实例模块的端口。
数组中的每个元素都可以作为一个标量或者向量,以同样的方式来使用,形如:<数组名>[<下标>]。
对于多维数组来讲,用户需要说明其每一维的索引。
例如:
integer flag [7:0] ; //8个整数组成的数组
reg [3:0] counter [3:0] ; //由4个4bit计数器组成的数组
wire [7:0] addr_bus [3:0] ; //由4个8bit wire型变量组成的数组
wire data_bit[7:0][5:0] ; //声明1bit wire型变量的二维数组
reg [31:0] data_4d[11:0][3:0][3:0][255:0] ; //声明4维的32bit数据变量数组
下面显示了对数组元素的赋值操作:
flag [1] = 32'd0 ; //将flag数组中第二个元素赋值为32bit的0值
counter[3] = 4'hF ; //将数组counter中第4个元素的值赋值为4bit 十六进制数F,等效于counter[3][3:0] = 4'hF,即可省略宽度;
assign addr_bus[0] = 8'b0 ; //将数组addr_bus中第一个元素的值赋值为0
assign data_bit[0][1] = 1'b1; //将数组data_bit的第1行第2列的元素赋值为1,这里不能省略第二个访问标号,即 assign data_bit[0] = 1'b1; 是非法的。
data_4d[0][0][0][0][15:0] = 15'd3 ; //将数组data_4d中标号为[0][0][0][0]的寄存器单元的15~0bit赋值为3
虽然数组与向量的访问方式在一定程度上类似,但不要将向量和数组混淆。
向量是一个单独的元件,位宽为 n;
数组由多个元件组成,其中每个元件的位宽为 n 或 1。
它们在结构的定义上就有所区别。
存储器
存储器变量就是一种寄存器数组,可用来描述 RAM 或 ROM 的行为。例如:
reg membit[0:255] ; //256bit的1bit存储器
reg [7:0] mem[0:1023] ; //1Kbyte存储器,位宽8bit
mem[511] = 8'b0 ; //令第512个8bit的存储单元值为0
参数
参数用来表示常量,用关键字 parameter 声明,只能赋值一次。例如:
parameter data_width = 10'd32 ;
parameter i=1, j=2, k=3 ;
parameter mem_size = data_width * 10 ;
但是,通过实例化的方式,可以更改参数在模块中的值。
局部参数用 localparam 来声明,其作用和用法与 parameter 相同,区别在于它的值不能被改变。所以当参数只在本模块中调用时,可用 localparam 来说明。
字符串
字符串保存在 reg 类型的变量中,每个字符占用一个字节(8bit)。因此寄存器变量的宽度应该足够大,以保证不会溢出。
- 字符串不能多行书写,即字符串中不能包含回车符。
- 如果寄存器变量的宽度大于字符串的大小,则使用 0 来填充左边的空余位;
- 如果寄存器变量的宽度小于字符串大小,则会截去字符串左边多余的数据。
例如,为存储字符串 "run.runoob.com", 需要 14*8bit 的存储单元:
reg [0: 14*8-1] str ;
initial begin
str = "run.runoob.com";
end
有一些特殊字符在显示字符串中有特殊意义,例如换行符,制表符等。如果需要在字符串中显示这些特殊的字符,则需要在前面加前缀转义字符 \ 。例如下表所示:
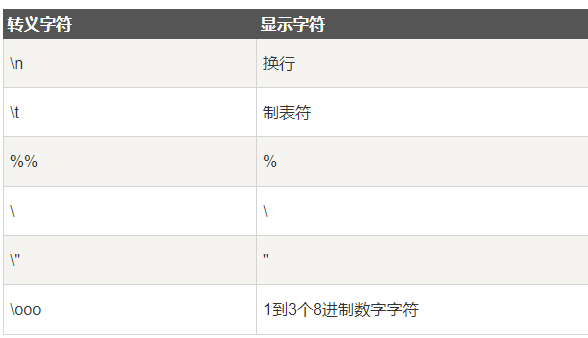
其实,在 SystemVerilog(主要用于 Verilog 仿真的编程语言)语言中,已经可以直接用关键字 string 来表示字符串变量类型。
本来可以直接学习SystemVerilog,但是有位前辈给我说建议先学学Verilog,以后对比学习更有好处。
2.4 Verilog 表达式
操作符,和很多编码语言类似,这里只详细罗列两种独特的:按位与归约。
表达式
操作数
操作符
算术操作符
关系操作符
等价操作符
逻辑操作符
按位操作符
-
按位操作符包括:取反(),与(&),或(|),异或(^),同或(^)。
-
按位操作符对 2 个操作数的每 1bit 数据进行按位操作。
-
如果 2 个操作数位宽不相等,则用 0 向左扩展补充较短的操作数。
-
取反操作符只有一个操作数,它对操作数的每 1bit 数据进行取反操作。
A = 4'b0101 ;
B = 4'b1001 ;
C = 4'bx010 ;
~A //4'b1010
A & B //4'b0001
A | B //4'b1101
A^B //4'b1100
A ~^ B //4'b0011
B | C //4'b1011
B&C //4'bx000
归约操作符
归约操作符包括:归约与(&),归约与非(&),归约或(|),归约或非(|),归约异或(^),归约同或(~^)。
归约操作符只有一个操作数,它对这个向量操作数逐位进行操作,最终产生一个 1bit 结果。
逻辑操作符、按位操作符和归约操作符都使用相同的符号表示,因此有时候容易混淆。区分这些操作符的关键是分清操作数的数目,和计算结果的规则。
A = 4'b1010 ;
&A ; //结果为 1 & 0 & 1 & 0 = 1'b0,可用来判断变量A是否全1
~|A ; //结果为 ~(1 | 0 | 1 | 0) = 1'b0, 可用来判断变量A是否为全0
^A ; //结果为 1 ^ 0 ^ 1 ^ 0 = 1'b0
移位操作符
拼接操作符
拼接操作符用大括号 {,} 来表示,用于将多个操作数(向量)拼接成新的操作数(向量),信号间用逗号隔开。
拼接符操作数必须指定位宽,常数的话也需要指定位宽。例如:
A = 4'b1010 ;
B = 1'b1 ;
Y1 = {B, A[3:2], A[0], 4'h3 }; //结果为Y1='b1100_0011
Y2 = {4{B}, 3'd4}; //结果为 Y2=7'b111_1100
Y3 = {32{1'b0}}; //结果为 Y3=32h0,常用作寄存器初始化时匹配位宽的赋初值
条件操作符
2.5 Verilog 编译指令
以反引号 ` 开始的某些标识符是 Verilog 系统编译指令。
编译指令为 Verilog 代码的撰写、编译、调试等提供了极大的便利。
下面介绍下完整的 8 种编译指令,其中前 4 种使用频率较高。
define, undef
在编译阶段,`define 用于文本替换,类似于 C 语言中的 #define。
一旦 `define 指令被编译,其在整个编译过程中都会有效。例如,在一个文件中定义:
`define DATA_DW 32
则在另一个文件中也可以直接使用 DATA_DW。
`define S $stop;
//用`S来代替系统函数$stop; (包括分号)
`define WORD_DEF reg [31:0]
//可以用`WORD_DEF来声明32bit寄存器变量
`undef 用来取消之前的宏定义,例如:
`define DATA_DW 32
……
reg [DATA_DW-1:0] data_in ;
……
`undef DATA_DW
`ifdef, `ifndef, `elsif, `else, `endif
这些属于条件编译指令。例如下面的例子中,如果定义了 MCU51,则使用第一种参数说明;如果没有定义 MCU、定义了 WINDOW,则使用第二种参数说明;如果 2 个都没有定义,则使用第三种参数说明。
`ifdef MCU51
parameter DATA_DW = 8 ;
`elsif WINDOW
parameter DATA_DW = 64 ;
`else
parameter DATA_DW = 32 ;
`endif
elsif, else 编译指令对于 ifdef 指令是可选的,即可以只有 ifdef 和 `endif 组成一次条件编译指令块。
当然,也可用 `ifndef 来设置条件编译,表示如果没有相关的宏定义,则执行相关语句。
下面例子中,如果定义了 WINDOW,则使用第二种参数说明。如果没有定义 WINDOW,则使用第一种参数说明。
`ifndef WINDOW
parameter DATA_DW = 32 ;
`else
parameter DATA_DW = 64 ;
`endif
`include
使用 `include 可以在编译时将一个 Verilog 文件内嵌到另一个 Verilog 文件中,作用类似于 C 语言中的 #include 结构。
该指令通常用于将全局或公用的头文件包含在设计文件里。
文件路径既可以使用相对路径,也可以使用绝对路径。
`include "../../param.v"
`include "header.v"
`timescale
在 Verilog 模型中,时延有具体的单位时间表述,并用 `timescale 编译指令将时间单位与实际时间相关联。
该指令用于定义时延、仿真的单位和精度,格式为:
`timescale time_unit / time_precision
time_unit 表示时间单位,time_precision 表示时间精度,它们均是由数字以及单位 s(秒),ms(毫秒),us(微妙),ns(纳秒),ps(皮秒)和 fs(飞秒)组成。时间精度可以和时间单位一样,但是时间精度大小不能超过时间单位大小,例如下面例子中,输出端 Z 会延迟 5.21ns 输出 A&B 的结果。
`timescale 1ns/100ps //时间单位为1ns,精度为100ps,合法
//`timescale 100ps/1ns //不合法
module AndFunc(Z, A, B);
output Z;
input A, B ;
assign #5.207 Z = A & B
endmodule
在编译过程中,timescale 指令会影响后面所有模块中的时延值,直至遇到另一个 timescale 指令或 `resetall 指令。
由于在 Verilog 中没有默认的 timescale,如果没有指定 timescale,Verilog 模块就有会继承前面编译模块的 `timescale 参数。有可能导致设计出错。
如果一个设计中的多个模块都带有 `timescale 时,模拟器总是定位在所有模块的最小时延精度上,并且所有时延都相应地换算为最小时延精度,时延单位并不受影响。例如:
`timescale 10ns/1ns
module test;
reg A, B ;
wire OUTZ ;
initial begin
A = 1;
B = 0;
# 1.28 B = 1;
# 3.1 A = 0;
end
AndFunc u_and(OUTZ, A, B) ;
endmodule
-
在模块 AndFunc 中,5.207 对应 5.21ns。
-
在模块 test 中,1.28 对应 13ns,3.1 对应 31ns。
但是,当仿真 test 时,由于 AndFunc 中的最小精度为 100ps,因此 test 中的时延精度将进行重新调整。
13ns 将对应 130100ps,31ns 将对应 310100ps。仿真时,时延精度也会使用 100ps。仿真时间单位大小没有影响。
如果有并行子模块,子模块间的 `timescale 并不会相互影响。
例如在模块 test 中再例化一个子模块 OrFunc。仿真 test 时,OrFunc 中的 #5.207 延时依然对应 52ns。
//子模块:
`timescale 10ns/1ns //时间单位为1ns,精度为100ps,合法
module OrFunc(Z, A, B);
output Z;
input A, B ;
assign #5.207 Z = A | B
endmodule
//顶层模块:
`timescale 10ns/1ns
module test;
reg A, B ;
wire OUTZ ;
wire OUTX ;
initial begin
A = 1;
B = 0;
# 1.28 B = 1;
# 3.1 A = 0;
end
AndFunc u_and(OUTZ, A, B) ;
OrFunc u_and(OUTX, A, B) ;
endmodule
此例中,仿真 test 时,OrFunc 中的 #5.207 延时依然对应 52ns。
`timescale 的时间精度设置是会影响仿真时间的。时间精度越小,仿真时占用内存越多,实际使用的仿真时间就越长。
所以如果没有必要,应尽量将时间精度设置的大一些。
`default_nettype
该指令用于为隐式的线网变量指定为线网类型,即将没有被声明的连线定义为线网类型。
`default_nettype wand
该实例定义的缺省的线网为线与类型。因此,如果在此指令后面的任何模块中的连线没有说明,那么该线网被假定为线与类型。
`default_nettype none
该实例定义后,将不再自动产生 wire 型变量。
例如下面第一种写法编译时不会报 Error,第二种写法编译将不会通过。
//Z1 无定义就使用,系统默认Z1为wire型变量,有 Warning 无 Error
module test_and(
input A,
input B,
output Z);
assign Z1 = A & B ;
endmodule
//Z1无定义就使用,由于编译指令的存在,系统会报Error,从而检查出书写错误
`default_nettype none
module test_and(
input A,
input B,
output Z);
assign Z1 = A & B ;
endmodule
`resetall
该编译器指令将所有的编译指令重新设置为缺省值。
`resetall 可以使得缺省连线类型为线网类型。
当 resetall 加到模块最后时,可以将当前的 timescale 取消防止进一步传递,只保证当前的 timescale 在局部有效,避免 timescale 的错误继承。
celldefine, endcelldefine
这两个程序指令用于将模块标记为单元模块,他们包含模块的定义。
例如一些与、或、非门,一些 PLL 单元,PAD 模型,以及一些 Analog IP 等。
`celldefine
module (
input clk,
input rst,
output clk_pll,
output flag);
……
endmodule
`endcelldefine
unconnected_drive, nounconnected_drive
在模块实例化中,出现在这两个编译指令间的任何未连接的输入端口,为正偏电路状态或者为反偏电路状态。
正偏电路状态指的是在PN结上施加正向电压,即P区接正电位,N区接负电位。在这种状态下,PN结处于正向偏置,电流可以通过PN结流动,使得PN结处于导通状态。在电子器件中,如二极管或三极管,当它们的PN结处于正偏状态时,它们可以允许电流通过。
反偏电路状态则是指在PN结上施加反向电压,即P区接负电位,N区接正电位。在这种状态下,PN结处于反向偏置,电流几乎被完全截止,PN结处于不导通状态。这种状态下,电子器件如二极管或三极管是关闭的,不允许电流通过。
正偏电路状态使得PN结导通,允许电流通过;而反偏电路状态则使得PN结截止,阻止电流通过。
`unconnected_drive pull1
. . .
/ *在这两个程序指令间的所有未连接的输入端口为正偏电路状态(连接到高电平) * /
`nounconnected_drive
`unconnected_drive pull0
. . .
/ *在这两个程序指令间的所有未连接的输入端口为反偏电路状态(连接到低电平) * /
`nounconnected_drive
#IC##FPGA##ASIC#参考资料:【菜鸟教程】