
面经实战 | OPPO三面
OPPO三面
一面(4.2,20min)
# 1.自我介绍
# 2.三个项目,问的很详细
后面专门会出一版怎么做自我介绍,以及项目怎么写,会怎么问,你该怎么回答。
3.SPI是什么?有几条线?几种模式?
SPI协议简介
板卡内不同芯片间通讯最常用的三种串行协议:UART、I2C、SPI,之前写过串口协议及其FPGA实现,今天我们来介绍SPI协议,SPI是Serial Perripheral Interface的简称,是由Motorola公司推出的一种高速、全双工的总线协议。
与IIC类似,SPI也是采用主从方式工作,主机通常为FPGA、MCU或DSP等可编程控制器,从机通常为EPROM、Flash,AD/DA,音视频处理芯片等设备。
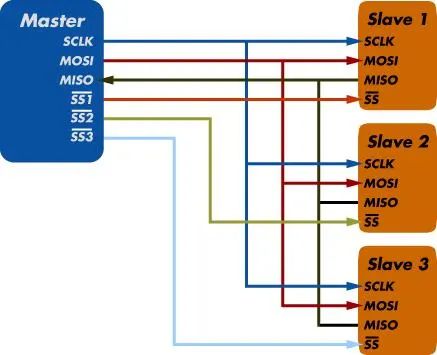
一般由SCLK、CS、MOSI,MISO四根线组成,有的地方可能是:SCK、SS、SDI、SDO等名称,都是一样的含义,当有多个从机存在时,通过CS来选择要控制的从机设备。
和标准SPI类似的协议,还有TI的SSP协议,区别主要在片选信号的时序上。
-
4线还是3线? 当我们谈到SPI时,默认情况下都是指标准的4线制Motorola SPI协议,即SCLK,MOSI,MISO和CS共4根数据线,标准4线制的好处是可以实现数据的全双工传输。当只有一个主机和一个从机设备时,只需要一个CS,多个从机需要多个CS,各数据线的介绍:
-
SCLK,时钟信号,时钟频率即SPI速率,和SPI模式有关
-
MOSI,主机输出,从机输入
-
MISO,主机输入,从机输出
-
CS,从机设备选择,低电平有效
3线制SPI,根据不同的应用场景,主要有以下2种类型:
- 只有3根线:SCLK,CS和DI或DO,适用于单工通讯,主机只发送或接收数据。
- 只有3根线:SCLK,SDIO和CS,这里的SDIO作为双向端口,适用于半双工通讯,比如ADI的多款ADC芯片都支持双向传输。在使用FPGA操作双向端口时,作为输入时要设置为高阻态z。
4种工作模式
既然是进行数据传输,双方就要明确从机在什么时刻去采样主机发出的数据,主机在什么时刻去读取从机发来的数据。
对于STM32等MCU自带的硬件SPI外设来说,可能没有那么重要,只需要配置一下模式就行了,但是对于使用使用GPIO模拟或者FPGA来实现SPI的时序,这一点是非常重要的,这就涉及到SPI标准协议的工作模式了,通过CPOL(Clock Polarity)时钟极性和CPHA(Clock Phase)时钟相位的不同组合,可以分为4种模式。
一般从机器件的工作模式是固定的,主机需要采用一样的工作模式,双方才能正常“交流”。
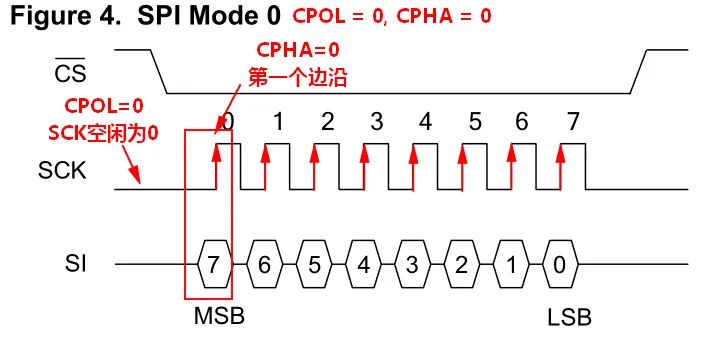
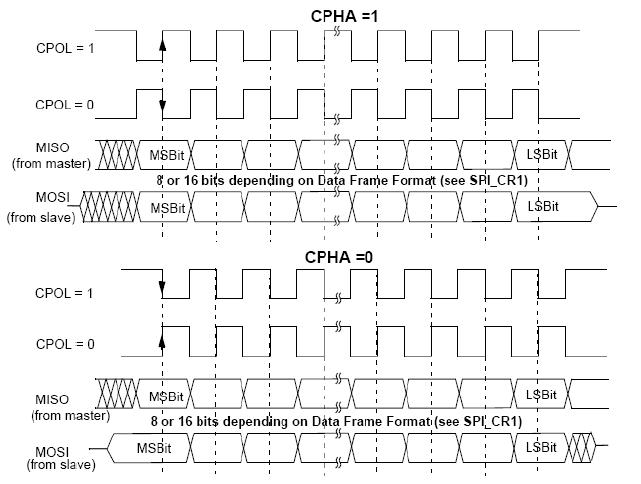
CPOL=0表示,SCK在空闲状态时为0
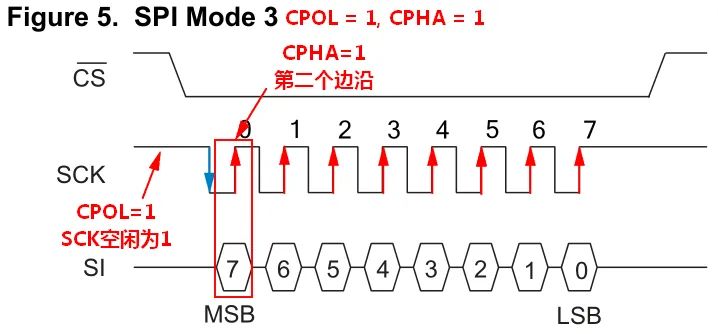
CPOL=1表示,SCK在空闲状态时为1
CPHA=0表示,在SCK第一个边沿时输入输出数据有效
CPHA=1表示,在SCK第二个边沿时输入输出数据有效
这四种模式中,应用最广泛的是模式0和3,大多数SPI器件都同时支持这两种工作模式,其实这些都不重要,具体采用什么模式,看你的器件手册就知道了。
以我最近工作中使用到的一款Cypress的铁电存储器FM25V05为例,在其官方DataSheet上介绍同时支持SPI Mode 0和Mode 3,

根据后面的时序图,可以得知SPI mode 0的读写时序,图中可以看出SCK空闲状态为低电平,主机数据在每个上升沿被从机采样,数据输出同理。
 对于SPI mode3,SCK空闲状态为高电平,主机数据在每个上升沿被从机采样,数据输出同理。
对于SPI mode3,SCK空闲状态为高电平,主机数据在每个上升沿被从机采样,数据输出同理。
模式1和模式2同理,模式1即CPOL=0,CPHA=1,SCK空闲为0,在SCK第二个边沿时数据有效,即SCK下降沿有效。

模式2即CPOL=1,CPHA=0,SCK空闲为1,在SCK第一个边沿时数据有效,即SCK下降沿有效。
 在一些自带SPI硬件外设的MCU上,设置主机的SPI模式非常简单,只需要配置几个寄存器的值即可,而且是写了SCK高电平还是低电平,和第一个还是第二个边沿,不用去记忆等于0还是等于1。
在一些自带SPI硬件外设的MCU上,设置主机的SPI模式非常简单,只需要配置几个寄存器的值即可,而且是写了SCK高电平还是低电平,和第一个还是第二个边沿,不用去记忆等于0还是等于1。
以STM32F103硬件SPI配置为例:
SPI_InitTypeDef SPI_InitStruct;
SPI_InitStruct.SPI_Mode =SPI_Mode_Master; //主
.....
SPI_InitStruct.SPI_CPOL =SPI_CPOL_High; //SCK空闲时为高电平
SPI_InitStruct.SPI_CPHA =SPI_CPHA_1Edge;//SCK第一个边沿有效
.....
SPI_Init(SPI2,&SPI_InitStruct);
而在FPGA中实现,需要严格根据时序来控制SCK和数据的输入输出。
多种传输速率
SCK的速率就是SPI的传输速率,SPI协议没有一个固定的速率,不像IIC标准模式100K,快速模式400K,高速模式3.4M,SPI的传输速率取决于器件本身支持多高的速率,器件手册里都有描述
SPI协议的基本时序
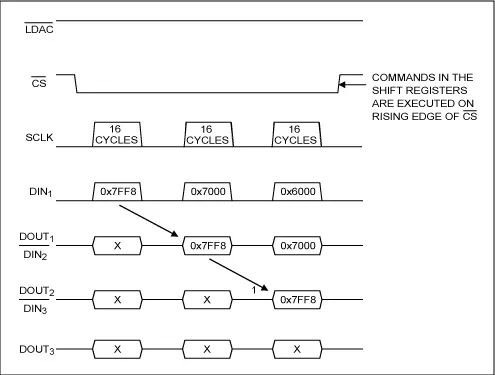
CS为低电平时,表示对应的从机设备被使能,在每个SCLK周期可以传输1Bit数据,采样时刻取决于器件支持的SPI mode,根据不同SPI器件的控制方法,在进行正式的数据读写操作前,一般需要先写入控制字,然后是寄存器地址和数据。
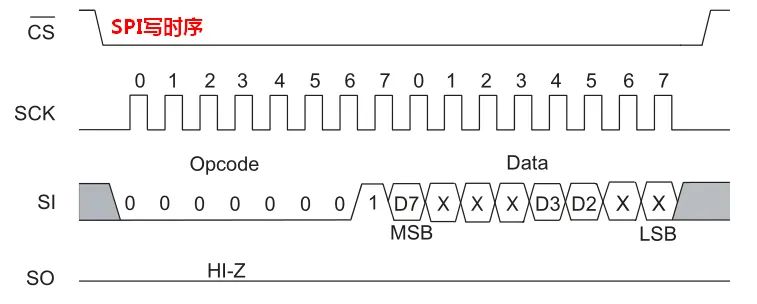
如果要使用FPGA来实现SPI时序,在CS下降沿和SCLK第一个边沿,或CS上升沿和SCLK最后一个边沿之间要留有一定的延迟时间,一般是0.5个SCLK周期。
一些SPI从机设备支持菊花链连接模式,即节省GPIO,又不会占据太多布线面积,但并不是所有的SPI器件都支持菊花链模式。

控制时序:
SPI协议的升级版
传统标准的SPI协议,一个SCLK周期只能传输1Bit数据,能不能一个SCLK传输多个Bit数据呢?答案是可以的。Motorola公司在现有的标准4线SPI协议上,又开发出了多种SPI协议的升级版,通过增加数据线位数的方式,来提高数据传输的效率,目前很多Flash厂家都已经支持多种SPI协议。
以比较常用的一款SPI Flash ROM W25Q128FW为例,在其器件手册上写着除了标准的4线SPI模式,还支持Dual SPI,Quad SPI,QPI等,在这几种模式下,IO0/1/2/3这些IO作为双向端口,大大增加了数据读写的速率。
SPI和IIC的对比
- SPI是全双工,而IIC是半双工。
- IIC支持多主机多从机模式,而SPI只能有一个主机。
- 从GPIO占用上来看,IIC占用更少的GPIO,更节省资源。
- SPI的数据位宽更灵活,可以根据需要选择多位数据宽度。
- SPI协议没有响应机制,主机无法得知从机是否接收到所发的数据,如果不采取一些方法的话可能会导致数据丢帧。
- 正是因为没有复杂的响应机制,SPI协议可以做到非常高的速率(上百兆),每一个SCK都可以进行数据的传输,通过引入CRC校验等校验方法,可以即高速传输数据,又能保持数据的准确度。
- IIC通过器件地址来选择从机,从机数量的增加不会导致GPIO的增加,而SPI通过CS选择从机,每增加一个从机就要多占用一个GPIO,当然也可以通过加入译码器来实现多从机控制。
- SPI协议在SCLK边沿进行采样,IIC在SCL高电平器件进行采样。
- 两者大多都应用于板内器件短距离通讯。
总结
使用FPGA来实现SPI时序,最大的好处就是灵活,时序可以根据需要精确的定制,可以实现非常高的速率,特别是同时驱动多片芯片上有很大的优势,在一些高速AD采集的场合必须使用FPGA来实现,难点就是做起来比较麻烦,需要一点点的调试,仿真,虽然FPGA也有一些现成的IP可以使用,但还是不够灵活。
不像STM32等MCU那样有现成的库函数和寄存器简单几行代码配置一下,就可以实现主从模式、SPI模式、数据位宽、多种速率、单线双线、半双工全双工、DMA等等。
总之,FPGA和MCU各有优点,也各有不足,根据需求来选择吧!无论采用什么控制器实现,只要根据数据手册严格控制时序,就没有什么协议是不能搞定的!
参考资料:******************
4.使用IO模拟过SPI吗?
原则:有硬件I2C、SPI时尽量用硬件操作,省去IO模拟繁琐的时序调试。但在内部资源不够时就要用IO模拟总线了。
关于短延时:
模拟时序时是否需要延时要看MCU与device的相对速度。比如I2C如果400K的速率和MCU动辄几十M的速率不再一个量级,肯定要通过延时调整时序;但对于SPI因为其速度很高,甚至有的比单片机的速度还高,这时就没必要延时了。
关于IO模拟的收发函数是否要合并成一个:
对于SPI因为是全双工,所以可以分开,当然也可以合并成一个(发送时不需要返回值,而接收时此时参数是要发送的数据,返回值是要读的值)
关于在什么跳变沿操作:
比如芯片手册中说到在上升沿采样/锁定(也就是在搞定平之后值必须稳定),那么单个位bit的收发都应该在0->1之间进行操作。
关于时钟极性和时钟相位:
CPOL时钟极性只是说明了空闲时总线的电平状态:CPOL=1表明空闲时时钟是搞定平;否则是低电平。
CPOA时钟相位说明了在第几个跳变沿进行采样,CPOA=0表明在第一个沿进行采样,否则在第二个沿。
#include "iom8535v.h"
#define _CPOL 1
#define _CPHA 0
#define SCK_IO DDRA|=0X01
#define MOSI_IO DDRA|=0X02
#define MISO_IO DDRA&=0XFB
#define SSEL_IO DDRA|=0X08
#define SCK_D(X) (X?(PORTA|=0X01):(PORTA&=0XFE))
#define MOSI_D(X) (X?(PORTA|=0X02):(PORTA&=0XFD))
#define SSEL_D(X) (X?(PORTA|=0X08):(PORTA&=0XF7))
#define MISO_I() (PINA&0X04)
void delay()
{
unsigned char m,n;
for(n=0;n<5;n++);
for(m=0;m<100;m++);
}
/************************************************
端口方向配置 与输出初始化
************************************************/
void SPI_Init(void)
{
SCK_IO ;
MOSI_IO ;
MISO_IO ;
SSEL_IO ;
SSEL_D(1);
MOSI_D(1);
#if _CPOL==0
SCK_D(0);
#else
SCK_D(1);
#endif
}
/**********************************************
模式零 写数据
***********************************************/
#if _CPOL==0&&_CPHA==0 //MODE 0 0
void SPI_Send_Dat(unsigned char dat)
{
unsigned char n;
for(n=0;n<8;n++)
{
SCK_D(0);
if(dat&0x80)MOSI_D(1);
else MOSI_D(0);
dat<<=1;
SCK_D(1);
}
SCK_D(0);
}
/*********************************************
模式零 读数据
*********************************************/
unsigned char SPI_Receiver_Dat(void)
{
unsigned char n ,dat,bit_t;
for(n=0;n<8;n++)
{
SCK_D(0);
dat<<=1;
if(MISO_I())dat|=0x01;
else dat&=0xfe;
SCK_D(1);
}
SCK_D(0);
return dat;
}
#endif
/**********************************************
模式二 写数据
***********************************************/
#if _CPOL==1&&_CPHA==0 //MODE 1 0
void SPI_Send_Dat(unsigned char dat)
{
unsigned char n;
for(n=0;n<8;n++)
{
SCK_D(1);
if(dat&0x80)MOSI_D(1);
else MOSI_D(0);
dat<<=1;
SCK_D(0);
}
SCK_D(1);
}
/*********************************************
模式二 读数据
*********************************************/
unsigned char SPI_Receiver_Dat(void)
{
unsigned char n ,dat,bit_t;
for(n=0;n<8;n++)
{
SCK_D(1);
dat<<=1;
if(MISO_I())dat|=0x01;
else dat&=0xfe;
SCK_D(0);
}
SCK_D(1);
return dat;
}
#endif
/*********************************************
模式一 写数据
*********************************************/
#if _CPOL==0&&_CPHA==1 //MODE 0 1
void SPI_Send_Dat(unsigned char dat)
{
unsigned char n;
SCK_D(0);
for(n=0;n<8;n++)
{
SCK_D(1);
if(dat&0x80)MOSI_D(1);
else MOSI_D(0);
dat<<=1;
SCK_D(0);
}
}
/*********************************************
模式一 读数据
*********************************************/
unsigned char SPI_Receiver_Dat(void)
{
unsigned char n ,dat,bit_t;
for(n=0;n<8;n++)
{
SCK_D(1);
dat<<=1;
if(MISO_I())dat|=0x01;
else dat&=0xfe;
SCK_D(0);
}
SCK_D(0);
return dat;
}
#endif
///
///
#if _CPOL==1&&_CPHA==1 剩余60%内容,订阅专栏后可继续查看/也可单篇购买
让实战与真题助你offer满天飞!!! 每周更新!!! 励志做最全ARM/Linux嵌入式面试必考必会的题库。 励志讲清每一个知识点,找到每个问题最好的答案。 让你学懂,掌握,融会贯通。 因为技术知识工作中也会用到,所以踏实学习哦!!!

 查看8道真题和解析
查看8道真题和解析
